paradigm hyperloop
Paradigm Hyperloop is a collaborative engineering team between Memorial University of Newfoundland and Northeastern University that aims to develop the hyperloop concept as the fifth mode of transportation. In August 2017, Paradigm placed second at the SpaceX Hyperloop Pod Competition, reaching 101km/h with the world's first air-levitated pod. In 2019, we placed 8th internationally at the fourth competition.

competition 4
2018/2019
Placed 8th in the World at the fourth SpaceX Hyperloop Pod Competition in July 2019!

Mechanical Systems Lead: Dec 2018 - Jan 2020
Interfaced with all sub-discipline teams (mechanical, electrical and software) and subsystem leads to ensure all systems are integrated onto the pod.
Troubleshoot assembly issues.
Worked with suppliers, sponsors and manufacturers to ensure all components and parts are completed and delivered on schedule.
Collaborated with sub-team leads to develop testing plans to ensure subsystems will perform as designed at top speed.
Root Cause Analysis of Failed Components
Wrote and reviewed Standard Operating Procedure (SOP's) that the team used for testing and on-site at SpaceX.

Belt that was broken during testing because the test bench hit natural frequency and shifted the setup.
Braking and Pneumatic Systems Lead: Oct 2018 - Aug 2019
Designed custom brakes that could safely decelerate the pod from from its top speed at 7.5 G’s.
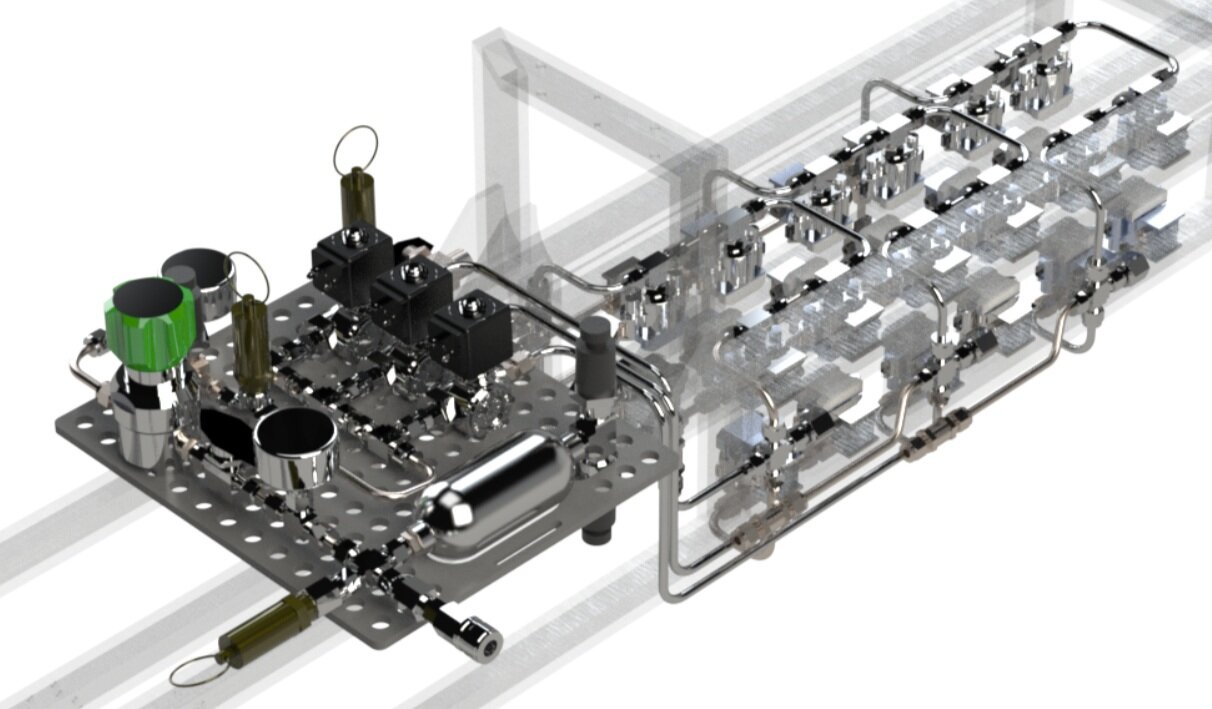
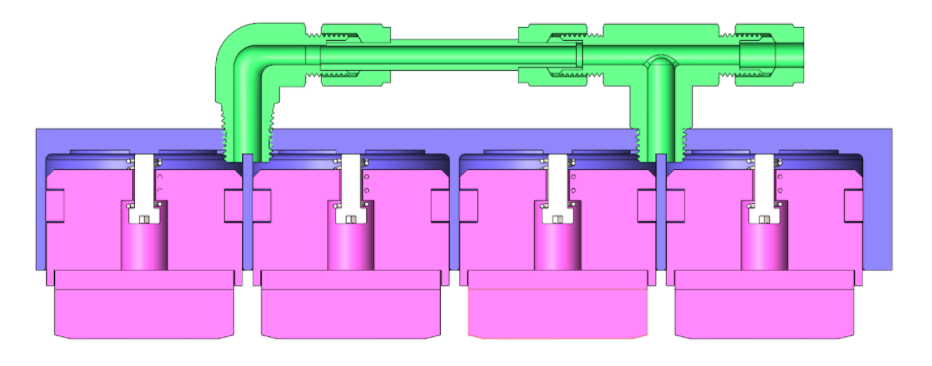
Designed the onboard air supply system and associated safety mechanisms to prevent over-pressurization and actuate the brakes.
Completed all safety-relevant calculations for the air supply system including relief valve sizing, energy equivalence and personnel safe distances.
Machined over 50 components for the braking system (both plastics and metals) using lathes and mills.
Created test plan to proof test and validate both the air supply system and brakes.
Writing Standard Operating Procedures (SOP's) used to safely pressurize and operate the entire system.
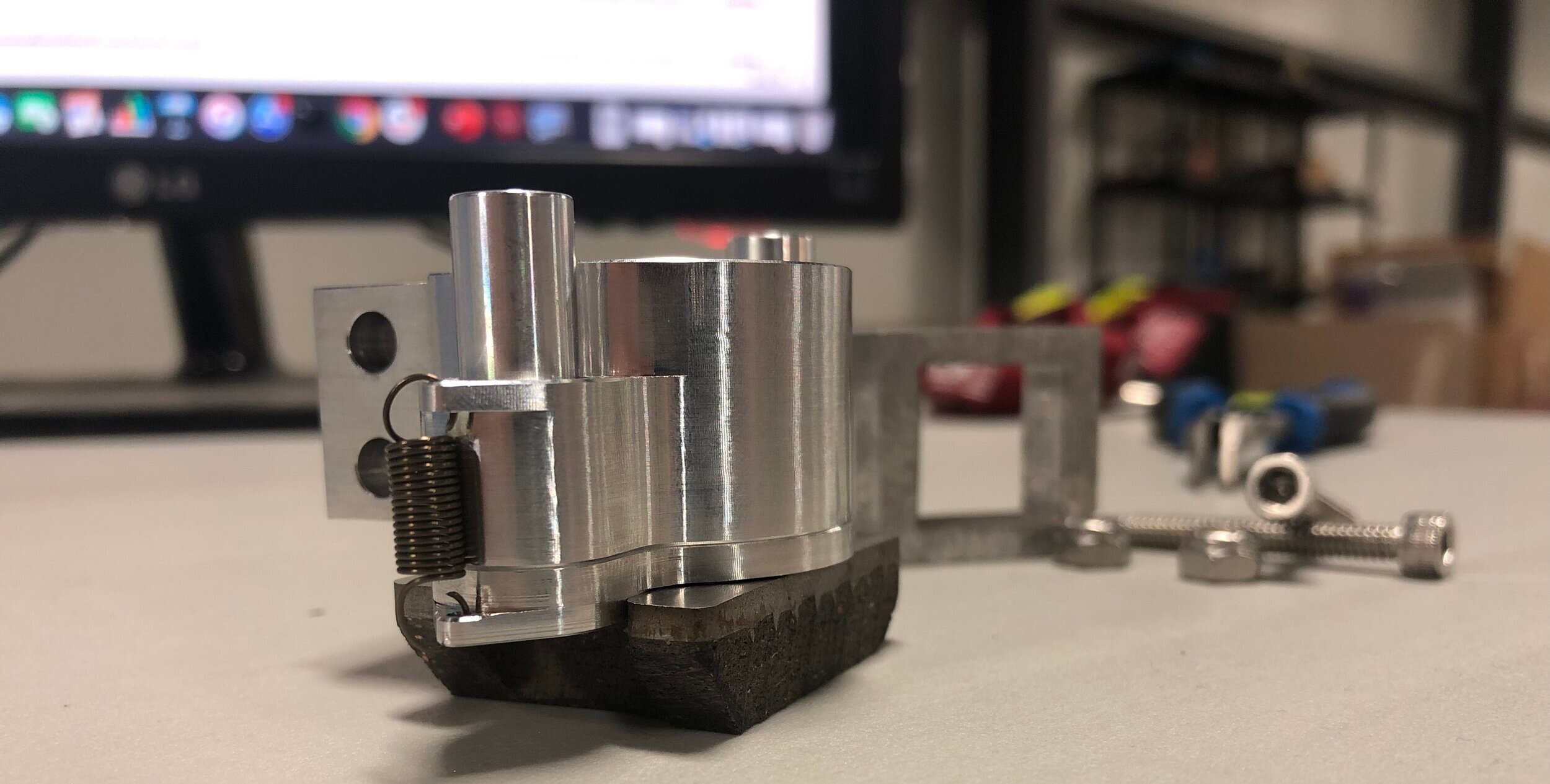
Prototype of our braking actuator prior to full scale fabrication.
I set up a load cell in a custom designed frame and used labview to record the test.
Final assembly of the braking system being tested on custom test bench at 9200 RPM which is equivalent to 507 km/h linear speed where the brakes are mounted.




Applying high strength adhesive was one of our manufacturing techniques for the brakes to reduce mass.
competition 3
2017/2018
Unfortunately we didn’t make the competition but as braking lead this comp I was able to learn a ton and it prepared me to build a robust braking system in competition 4.
Braking Lead: Sept 2017 - Mar 2018
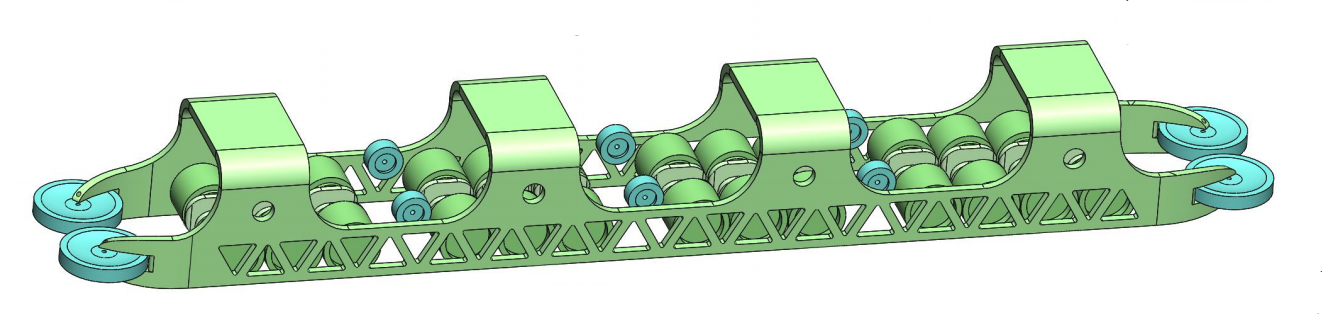
Led a team of 5 to design a simple and robust custom braking system that integrated with the lateral and vertical stability mechanisms.
Created design timeline.
Coordinated with structures, vertical stability and lateral control teams to integrate as a single module.
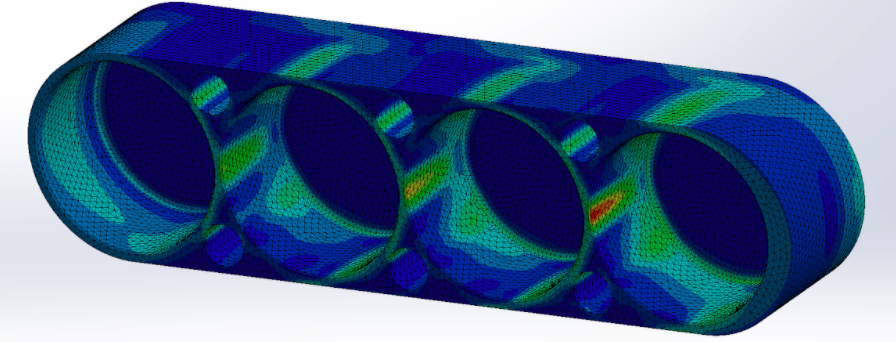
Performed FEA Analysis to ensure the system could undergo the loading during the braking phase while simultaneously having an internal pressure of 200 psi.
competition 2
2017
Placed 2nd in the World after reaching a top speed of 101 km/h at the second SpaceX Hyperloop Pod Competition in August 2017!

Take Off and Landing System Lead: Jan 2017 - Aug 2017
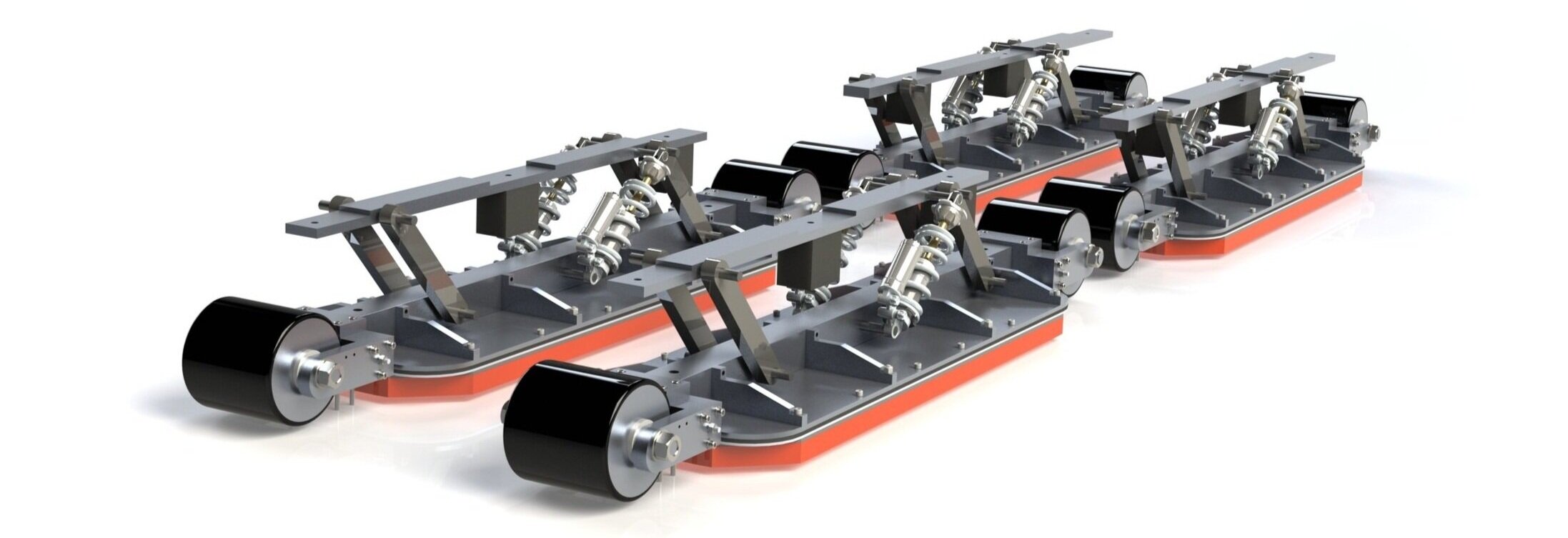
Designed the high-speed wheel system that supported the 900 kg pod travelling at its record speed of 101 km/h.
Finite Element Analysis (FEA) to ensure adequate safety factors of the system were met for its maximum design speed of 320 km/h.
Completed all parts drawings used for machining and system assembly.

Sourced required fasteners, materials and off the shelf components needed for manufacturing.
Over 50 hours of machining using a drill press, lathe and a CNC mill to manufacture all system components along with the subsystem assembly and pod integration.